今回のホビーショー一番のトピックは ”Sky-Hero Little Spyder” のお披露目! と思い込んでいた私。しかし、そこへ続くルートの途中で見かけてしまったJR PROPOブース。こちらのインパクトが強すぎました。
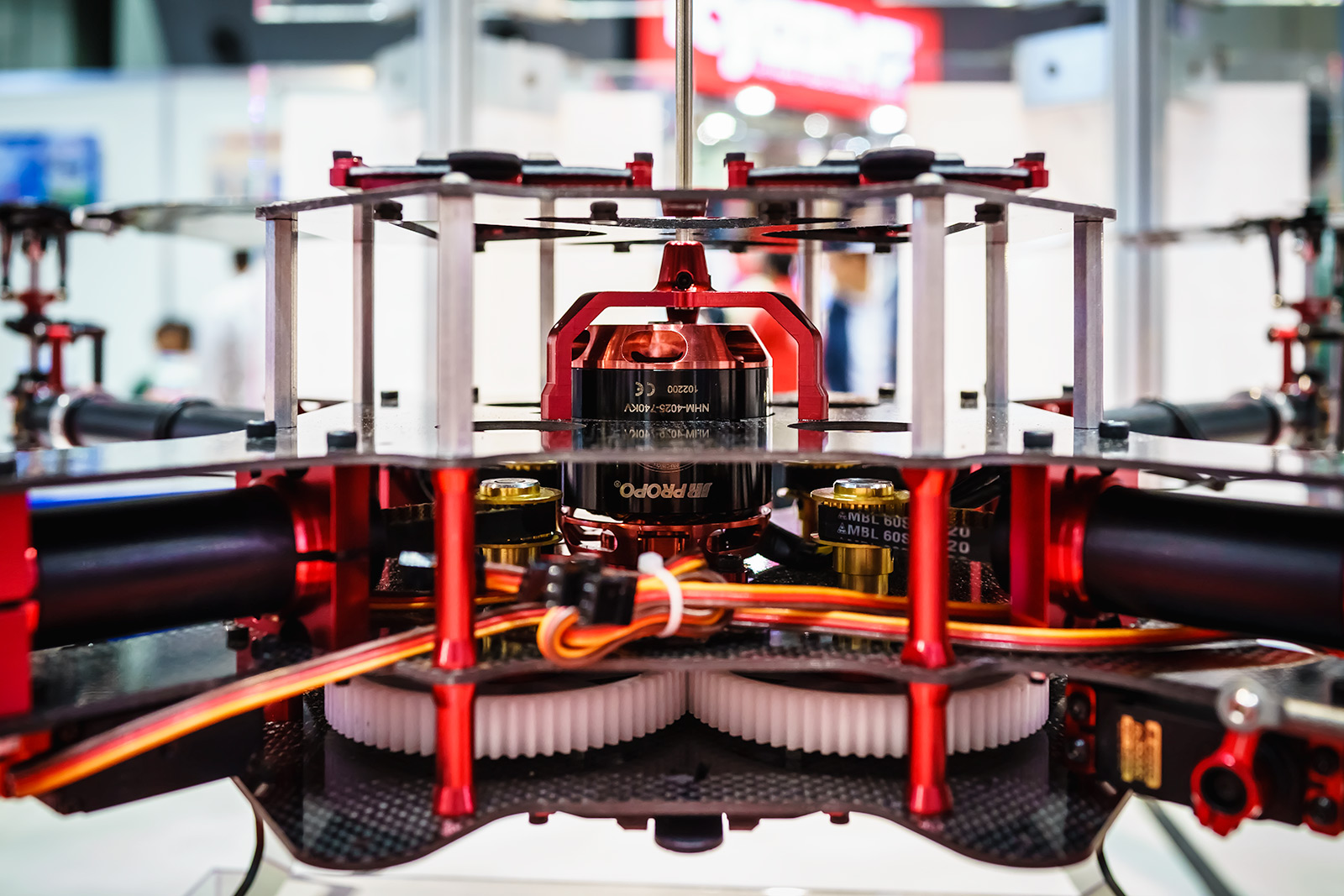
マルチコプターなのにフレームセンターに鎮座するのはたった一つのモーター。そうこの機体こそ次世代マルチ、可変ピッチ式マルチコプターなのです。次世代ってのは言い過ぎましたか...。
以前、何処かの雑誌(ラジコン技術か何か)に掲載されていた噂の開発機が地味に展示されておりました。これだけ新しい事をするならもっと大胆な展示にすれば注目されるでしょうに、殆どの人が気付いていないのか足も止めず素通り状態。だって説明パネルも何もありませんから、知らない人からしたら「ああここにも似たようなのが展示されてるわ」くらいにしか思わないのでしょう。こいつは他のマルチとはちょっとばかり違いますよ!
一般的なマルチコプターはクアッド、ヘキサ、オクタ、を問わず基本原理はアームの数だけ先端にモーターを付け、それぞれの回転数を制御する事で浮力をコントロールし姿勢をキープしたり方向を変えたりするわけですが、この機体の場合には一つのモーターで全てのペラを同じ回転数で回しておいて、各ペラのピッチをコントロールする事で機体の制御を行います。まあ一言で言えばそういう事ですがそれがどう凄いのか?
詳しい方は既にご存知かと思いますが、今流行している固定ピッチ式マルチコプターの最大の欠点は降下時のコントロールにあると言われています。固定ピッチですからペラが回っている限りは下向きに風を送り続けているわけで、その状態で急降下を行うと自分が吹き下ろした乱気流の中に新たな風を送り込みながら突入していく計算になりますから姿勢が大きく乱れます。姿勢を立て直すためにはペラの回転数を上げて乱気流の中に更に強力な風を送り込む事になりますからますます姿勢は崩れる方向...。これが所謂ハンチングの原理かと。DJI Phantomの新しいファームウェアがリリースされる度に降下速度に制限が掛けられたのにはこれへの対策が理由かと思われます。つまり、マルチコプターは降下時が一番危険。
ところが可変ピッチによる制御であれば、ピッチをゼロにすれば吹き下ろす風もゼロに出来ますし、極端な話マイナスピッチにすれば風は下ではなく上に吹き上げる事も可能、それでいて回転数は一定ですから瞬時に舵を打った場合にも立ち上がりが早く、機体のコントロールにおいては抜群に有利なはずです。ラジコンヘリの3Dフライトが物凄い回転数で行われるのはこのピッチコントロールを巧みに使うからですね。

さて、一般的なヘリコプターの観点で見た可変ピッチのメリットというのはそういった事だと思いますが、こと撮影機材という目線で見た場合にも可変ピッチにはとびきりのメリットがあり、それは振動対策!
ここまで何度か書いた通り、可変ピッチコントロールの場合は基本的に回転数は一定。という事は機体毎に持っている固有の共振周波数を避ける回転数設定が出来るという事。一般的なマルチコプターはホバリング時は安定していても上昇時のみ振動が発生したり、降下時のみ発生したりとモーターの回転数に左右されます。物体には必ず共振周波数があって特定の回転数で振動が激しくなりますから、モーターをバリアブルにコントロールする一般的なマルチコプターではこの振動に非常に敏感です。ところが可変ピッチであればその共振周波数を避ける回転数に固定しておけばあとはピッチだけのコントロールで飛ぶ事が出来ますから原理的に考えても空撮向きです。
まあ、そんな数々の先入観を持ったまま実際にJR(電車じゃないです。日本遠隔制御株式会社です)の担当者に色々質問をぶつけてみると、私の理解は概ね合っているらしく、確かにこの機体は降下時の安定性と振動に対してかなり有利であるとおっしゃっていました。それにモーター直付けの固定ピッチ機と違いベルト駆動としている事で、ギヤ比を工夫する事が可能となり、大きなペラが回せるというメリットもあるそうで...。なるほど確かにそうかもと納得。この機体で2〜3kgは持ち上げられるような事を言っていましたからDSLR+ジンバルも行けちゃいそうです。
ただ技術的な難しさは色々あるそうで、どうやらNAZAなどのコントローラーがそのまま使えないのだそうです。ジャイロやGPSからの情報を制御にフィードバックさせるのは固定ピッチと同じはずですが、それをモーターの回転数に変換するのと、ピッチ変更のためにサーボをコントロールするのではスピードや変化量が全然違うそうです。恐らくモーターの回転制御のつもりでピッチコントロールをすると変化量が大きすぎて大げさに制御されてしまうのでしょうね。プロポから人間の手で操作するのならエクスポネンシャルを使えそうですけど、NAZAからの信号ですから手が出し難いのでしょう。どうやらJRさん、そこんとこ専用コントローラーまで作る意気込みでいるようでした!
更に、コメントの中には次なるステップへの計画も含まれていて、今現在は電動のこのサイズでテストしていますがいずれはエンジン機を検討していると。電動では飛行時間がどうしても15分程度になってしまうそうで、今目指しているのはエンジンで1時間とか2時間の飛行なんだそうです。主に災害現場等の業務目的の空撮をターゲットにしているとか! グローエンジンではなくガソリンエンジンで、振動を考慮すると水平対向ですね。なんて冗談とも本音ともとれる会話もあり。
いつかマルチコプターでマイナスピッチあてて3Dフライト!なんて日が来るんでしょうかね。「リリースは1〜1年半後ですかね」とおっしゃっていましたからどうやら本気で商品化を目指しているようです。楽しみですね。


3Dヘリも、楽しんでいましたが、よ~くよ~く墜落させました。(最後は大破で修理不能)
ヘッド回りと、ベルトのメンテナンスが大変そうですね、反面ギヤ比で(勿論機体からはみ出てしまいますが)大型&小燃費が出来そうですし、当然エンジ化も簡単そうですね。ただし、墜落時は大変な被害が出そうです。
こんにちは。
ヘリのテールミッションを使ってますね。
これは理に叶った考えだと思います。
真下に降下するときにマイナスにすれば、セットリングを避けられます。
最大のメリットは、固定ピッチだと電池切れなどで停止したら自然落下しか出来ませんが、
可変ピッチだとオートローテーションが可能になることでしょう。
デメリットは、コックドベルトの抵抗と、部品点数の増加によるコストアップだと思います。
テールミッションだけでも高価なので、モーター仕様でも20万以下では難しいでしょうね。
JRは高い技術を持っているのに気さくな人が多いです。
姿勢制御システムの完成が待ち遠しいですね。
イノシシとのバトルは、恐ろしいことに事実です。
カネキチ~ さん
3Dもやっていたのですか? シュミレーターで完璧にマスターしてからならともかく実機で腕を磨くにはリスクが高いですよね。”最後は大破” その結末は容易に想像がつきますw
可変ピッチマルチは一般的なマルチより部品点数が多い分、故障の確率が上がりますから日々のメンテナンスと調整は入念に行う必要がありそうですね。メカ好きにはたまらないオモチャになりそうですけど! 今後の開発に期待です!
Thunderbirdさん
JRさん、今は有りもののパーツで組んでいます!と言っていましたから見慣れた部品ばかりかもしれませんね。今後はシャフトドライブも検討してアームが折り畳めるような工夫も考えたいそうです。たしかにこのままでは運搬時に嵩張りますもんね。
オートロ、確かにその通りですね。マルチのオートロってちょっと見てみたいです。ラダーは効くのだろうか?と疑問もありますけど。
JRさんは純日本製ということで割高感は否めませんが技術的な安心感はありますね。今後に期待です!
あ、次はイノシシの空撮も期待しています!